前沿机器人 | 可重构机身的四旋翼无人机混合运动
题目:前沿机器人 | 可重构机身的四旋翼无人机混合运动
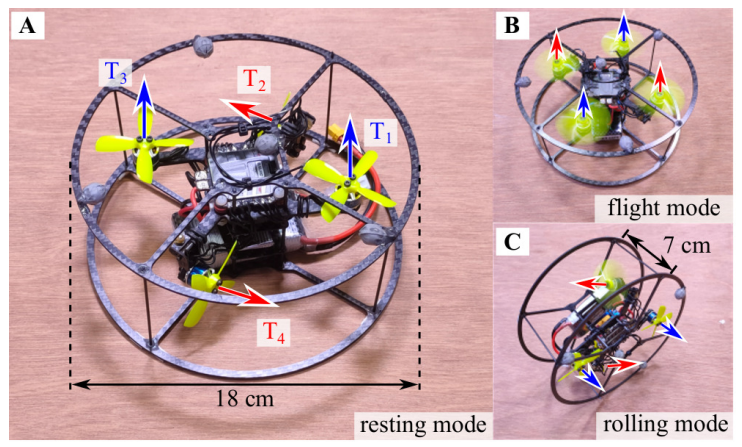
上图为具有两个被动旋转的双峰四旋翼结构关节,其中蓝色箭头表示固定螺旋桨(T1 和 T3)的轴线,红色箭头表示旋转螺旋桨(T2 和 T4)的轴。
(A)图表示:机器人处于默认状态。
(B)图表示:两个被动关节在高马达指令的驱动下,由推进推力激活飞行。
(C)图表示:滚动配置的车辆通过默认配置的两个倾斜螺旋桨产生滚动推力,由于推进力低,被动关节不会被激活,滚动模式下机器人的宽度比飞行模式下的窄。
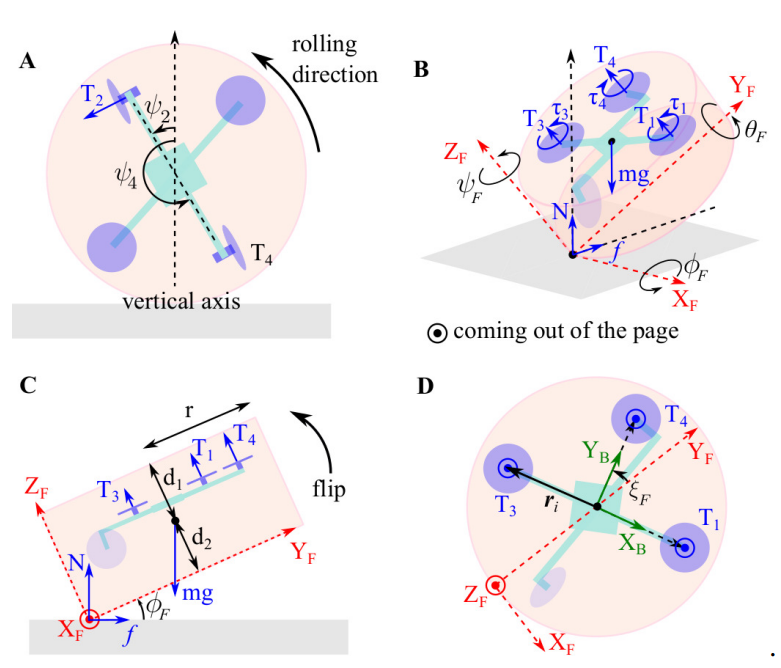
(A)图表示:车辆在单轮状态下在地面滚动。
(B)图表示:在翻转时机器人的自由车身图,定义了非惯性框架来描述飞滚过程,在飞滚过程中,沿Zp轴的转矩被螺旋桨诱导转矩平衡。
(C)图表示:在翻转过程中,车辆的侧视图显示了关于Xp轴的扭矩。
(D)图表示:从ZF轴上看到的机器人俯视图说明了沿YF轴的扭矩平衡。
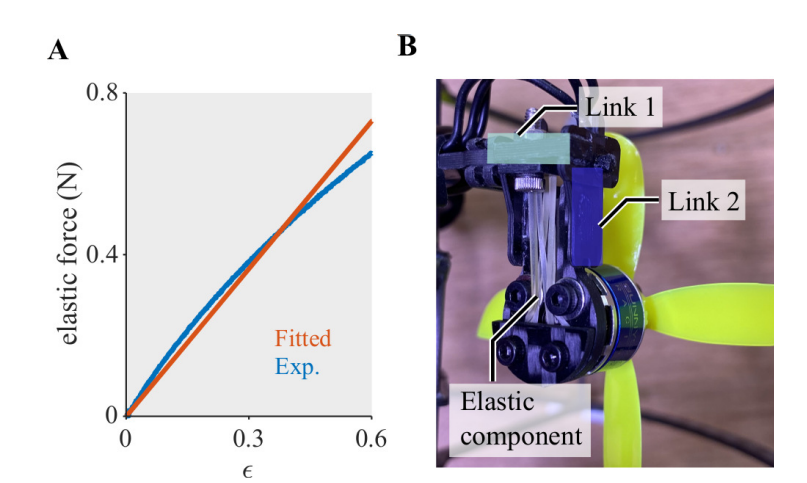
(A)图表示:单根橡皮筋的受力轮廓,ε∈[0,0.5]的配合刚度为98 N/m。
(B)图表示:带两个橡胶带的旋转接头。

飞行-滚动演示
(A)图表示机器人超时反转角度ΦF,多条线表示不同的扑动方向ξF,d。
(B)图表示不同的f点质心轨迹。
(C)图表示序列图像说明了ξF=4Π/3情况下的机动。
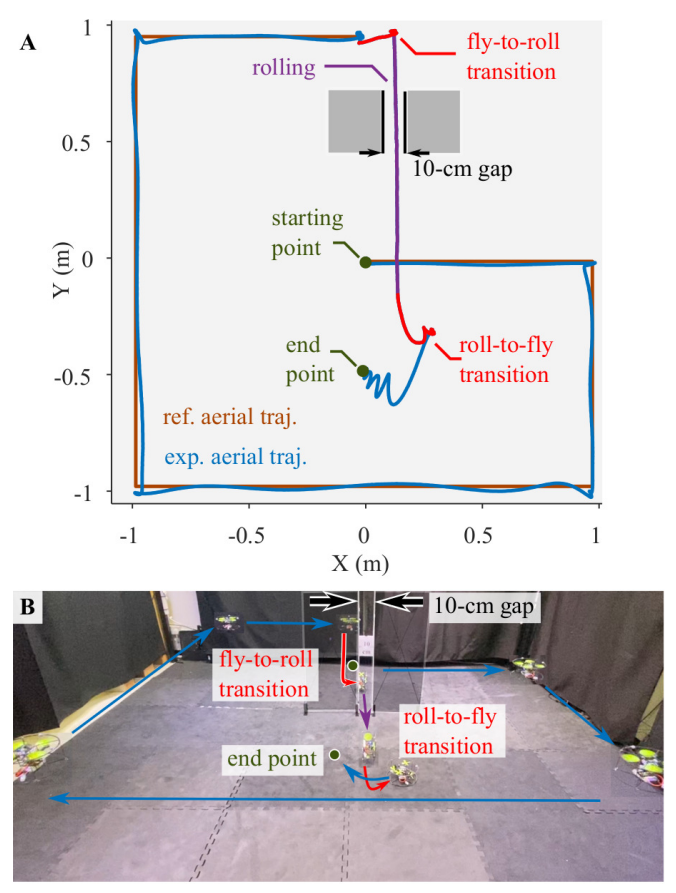
(A)图表示间隙尺寸为 10 厘米的混合运动实验的参考和实现轨迹。
(B)图表示显示机器人在不同轨迹阶段的合成图像。
相关资料:
视频地址:https://m.youtube.com/watch?v=bzM2jB5JSnk
PDF资料: https://ris.bme.cityu.edu.hk/wp-content/papercite-data/pdf/jia2022a.pdf
更多关于该实验室的研究:
https://ris.bme.cityu.edu.hk/publications/
阿木实验室致力于为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
公众号:阿木实验室 ( 领取免费资料包)
官方淘宝店:阿木实验室(可购买硬件配件)
硬件咨询:danqiu199506或yanyue199506(欢迎洽谈合作)
课程咨询:jiayue199506 (免费领取机器人工程师学习计划)
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
作者:Huaiyuan Jia, Songnan Bai, Runze Ding, Jing Shu, Yanlin Deng, Bee Luan Khoo, and Pakpong Chirarattananon
来源:IEEE 2022


