炸机不可怕,可怕的是你不知道为什么炸
在无人机飞行过程中,经常会碰到自旋、掉高、异常炸机等各种各样的问题。要解决这些问题,我们就需要学会分析储存在飞控中的飞行日志。日志分析在飞控调参、后期数据处理、炸机原因分析等方面用处非常大。本文中笔者将以具体的日志案例,结合分析工具来为大家在线分析日志,点击以下链接可查看此案例:https://logs.px4.io/plot_app?log=d758975f-4974-4736-bf9d-ab127dc6b182
PX4日志分析工具介绍
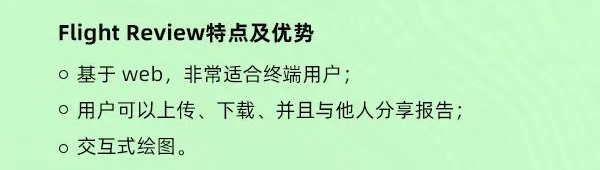
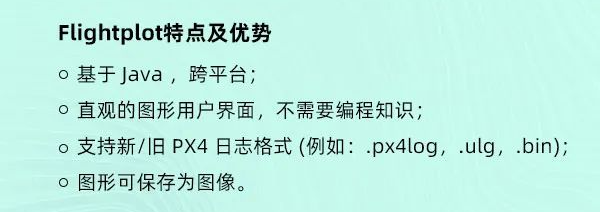
首先,给大家推荐两款适合日志分析入门的工具,分别是Flight Review和Flightplot。本文主要以Flight Review工具为例进行介绍,后续我们还会以Flightplot工具为例再发布一篇日志分析文章,大家可以持续关注。
QGC地面站日志下载
相关参数
如果想要无人机在上电后便开始记录日志,需要将 SDLOG_MOOE 该参数设置为boot到shutdown。
下载方式
(1)使用地面站进行离线下载(下载速度较慢)。
(2)使用地面站进行usb下载(下载速度适中,推荐使用)。
(3)使用内存卡进行读卡器进行读取(飞控内存卡多次拔插,易对卡座造成损坏)。
下载步骤
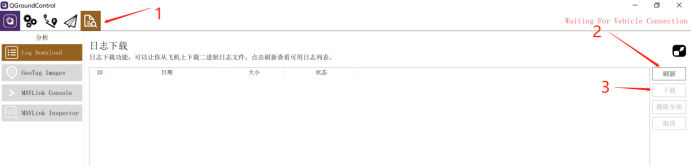
通过数据线将飞控与地面站进行连接,连接之后按以上步骤执行,其中第二步执行完毕后选择需要下载的日志点击下载即可。
Flight Review入门
无人机基本信息查看分为个人查看和共享查看两种形式,共享查看方式可方便他人查看并提供协助。Flight Review提供了两种上传日志的方式,按需选择上传方式即可。
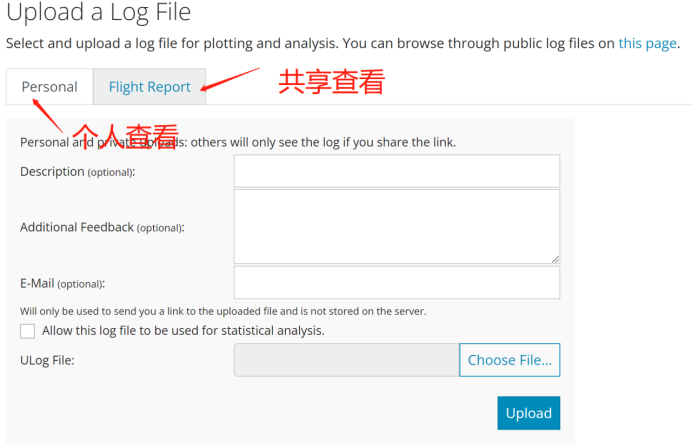

按照上述步骤选择要分析的日志,点击上传,之后会出现无人机基本信息及日志曲线。
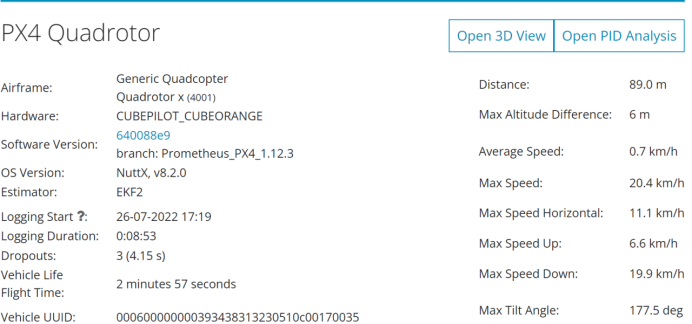
该部分可以查看无人机机架类型,固件版本,日志记录时间,飞行时间等等数据。点击open 3D view后可打开无人机3D飞行视角如下:

Flight Review数据分析
不同颜色模块(飞行模式)、图例(选择显示内容)、参数消息、消息打印等等,左右拖拽可以移动图表,单击参数可以选择或者取消该参数对应的曲线。
常用数据分析
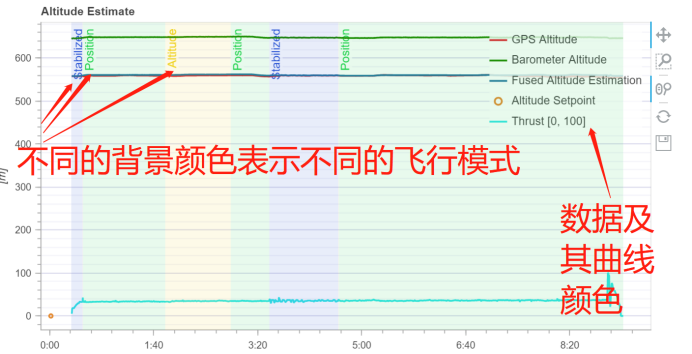
(1)高度信息其中包括GPS高度、气压计高度、融合高度估计,高度定位点,以及推力。
(2)该分析工具直接列出了无人机横滚轴,俯仰轴,偏航轴在角度和角速度实际值与期望值,方便用户之间查看。
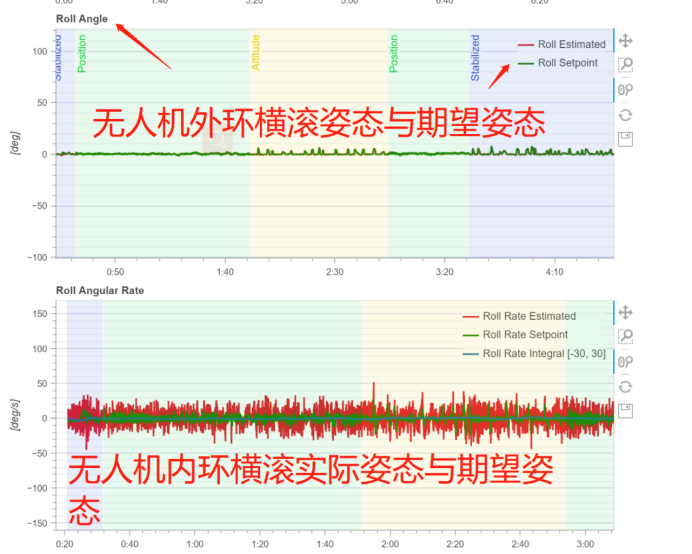
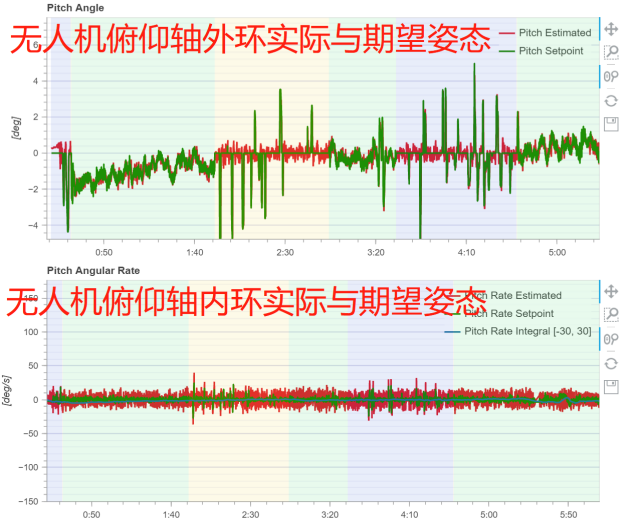
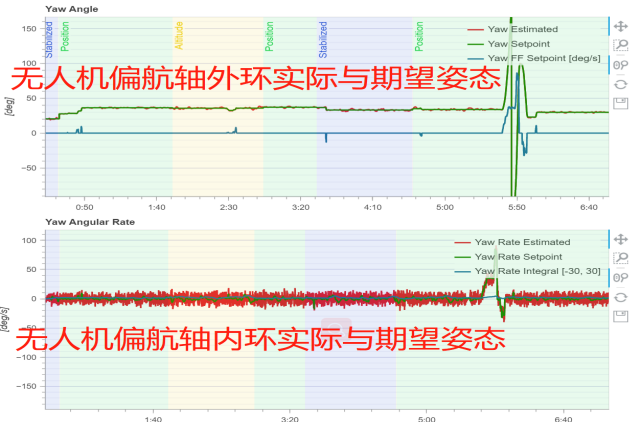
对于期望姿态和实际姿态数值应尽量的相近,从曲线上看就是两条线应该尽量重合,俩条曲线重合性和跟随性好就说明无人机飞行性能不错,PID调节比较合适,无人机能够很快很稳的到达预期角度。
(3)无人机x、y、z三个方向期望与实际位置

(4)无人机在飞行过程中电机电调输出的PWM值
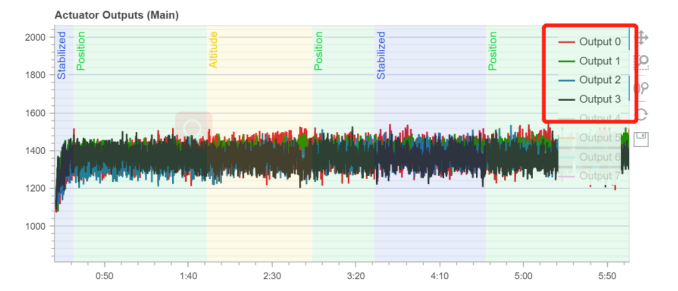
该部分记录了飞控对各电机的输出大小,多轴电机悬停时应该所有电机输出差异不大,从这一项我们可以看出飞机重心,电机水平等情况,如果相邻两个电机输出大,相对的两个输出小,就说明重心偏向输出大的电机那一边了;如果是对角的两个电机输出偏大,则要检查是不是电机座没有安装水平;还能通过各轴电机输出的变化推算出飞机当时的姿态和动作情况。
(5)遥控器摇杆与通道输入
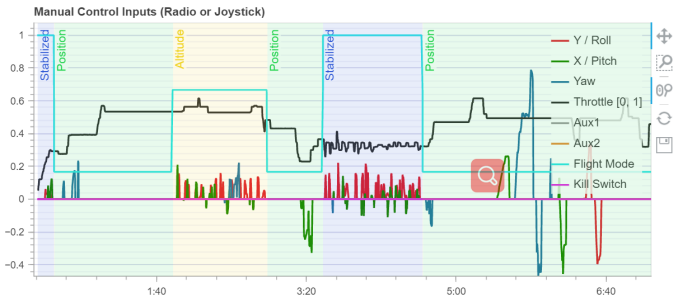
曲线分别表示飞控接收到遥控器信号的记录值,有横滚、俯仰、偏航、油门、控制飞行模式以及锁桨等通道的输出。
(6)原始加速度
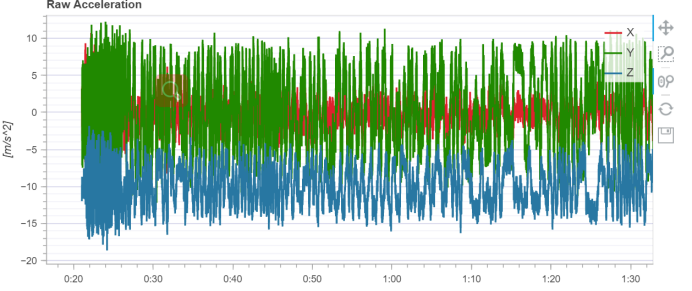
该图显示了 x、y 、z 轴的原始加速度计测量值。理想情况下,每根线条都很细,可以清楚地显示车辆的加速度。如果 z 轴图在悬停或慢速飞行期间接触 x/y 轴图,则振动级别太高。
(7)GPS设备信息显示
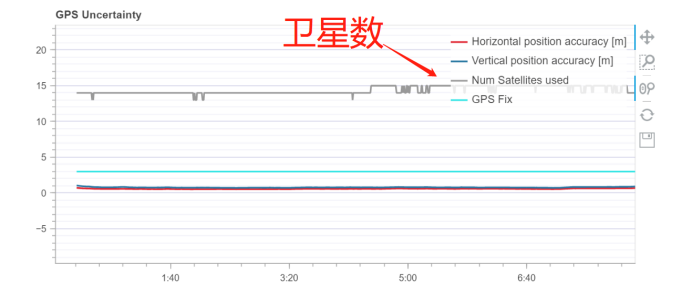
图中显示了有关GPS的信息,用于分析无人机定位不准相关问题。
注意:
(1)使用卫星的数目(GPS Fix)应大约或多余 12 个;
(2)水平位置精确度(Horizontal position accuracy)应小于 1 米;
(3)垂直位置精确度(Vertical position accuracy)应小于 2 米。
(8)在QGC地面站中所有参数显示以及无人机飞行过程中消息打印

消息打印一栏包含飞行过程中所有系统错误和警告消息。
关于该分析工具的基本使用可前往PX4官网中查看详细介绍,链接如下:https://docs.px4.io/main/zh/log/flight_review.html
总的来说,在分析日志前要先了解无人机存在的具体问题,包括无人机实体硬件情况、飞行视频、飞行环境等。针对具体问题,寻找可能造成该问题的传感器、参数设置、硬件等,然后根据所有的可能性,查看有关日志进行逐个排查。
以上内容希望能够帮助到有需要的开发者,后续还会为大家推出一期关于Flightplot分析工具的文章,敬请关注!
笔者:阿木实验室工程师 吕国飞


