新品上架 | Crazyswarm无人机集群套件,小巧玲珑实力无限
无人机集群技术有着广泛的潜力应用,如搜索和救援、环境监测、农业、建筑、物流等。通过多个无人机的协同工作,可以提高效率、扩展覆盖范围以及执行一些单个无人机难以完成的任务。为实现室内环境无人机集群算法的验证以及更复杂的任务和应用,我们推出了这套无人机集群套件——Crazyswarm。
Crazyswarm是一款基于无人机的集群算法验证平台,旨在探索和实现多无人机系统的协调飞行和集群行为,为开发者提供一个实验、学习和开发的验证平台,帮助他们更好地理解多无人机系统的控制和协调原理,测试和验证无人机集群算法、路径规划策略、协调行为等,进而推动无人机集群技术的研究和应用,提高研发效率。

硬件组成
1.无人机(Crazyflie):Crazyswarm的核心硬件平台,具有飞行控制、传感器等必要组件。采用轻量级无人机设计,重量仅为27g,轴距为92mm。
2.Lighthouse基站:基于厘米级的灯塔定位系统,通过基站发射的光信号来实现高精度的无人机定位。
3.外部传感器:如超声波、光流等多类传感器,用以增强对环境的感知和定位能力。
4.Amov仿真主机:用于运行ROS、控制算法、仿真环境等。
5.无线通信模块:如蓝牙、CrazyradioPA等,实现无人机之间的数据传输和协同飞行。
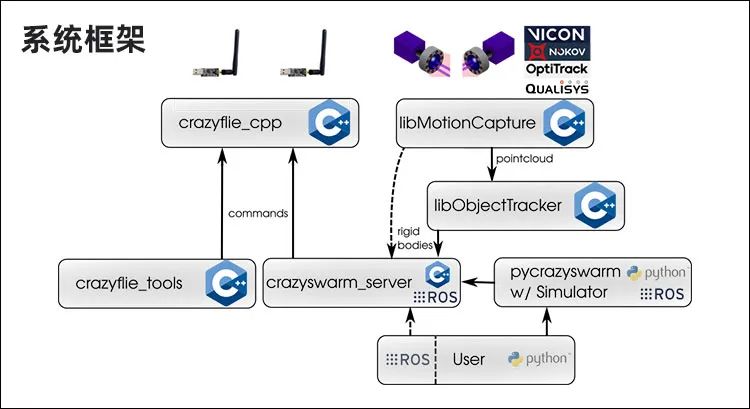
软件组成
由一系列ROS包和Python脚本组成,实现了无人机的控制、仿真和数据分析等功能。提供PythonAPI/ROS/Matlab接口,方便开发者进行编队功能开发。
核心优势
1.厘米级定位:集成Lighthouse技术,通过基站发射的光信号实现高精度的无人机定位,让无人机实现更精细的飞行控制和协同动作。
2.多数量集群控制:可同时控制数十架无人机,实现集群飞行和协同行为。开发者还可以编写代码来实现不同无人机之间的协同动作,如编队飞行、跟随、集体避障等。
3.高度可定制化:控制系统基于 ROS,支持开发者对其进行定制化的修改,以满足特殊的控制需求或者进行特定的研究。
4.实时运动规划和控制:支持实时的运动规划和控制,可根据实时的环境变化调整无人机的飞行路径。
5.多种控制方式:支持PythonAPI、MATLAB、ROS开发等,并提供多个集群Demo,可以实现编队飞行,轨迹控制,多机协同等功能。
功能特点
1.飞行控制:提供高级飞行控制接口,开发者可以编写代码来控制无人机的飞行姿态、位置和速度,实现各种复杂的飞行任务。
2.传感器集成:集成了多种传感器,包括加速度计、陀螺仪、压力传感器等,用于获取无人机的状态信息和环境数据。
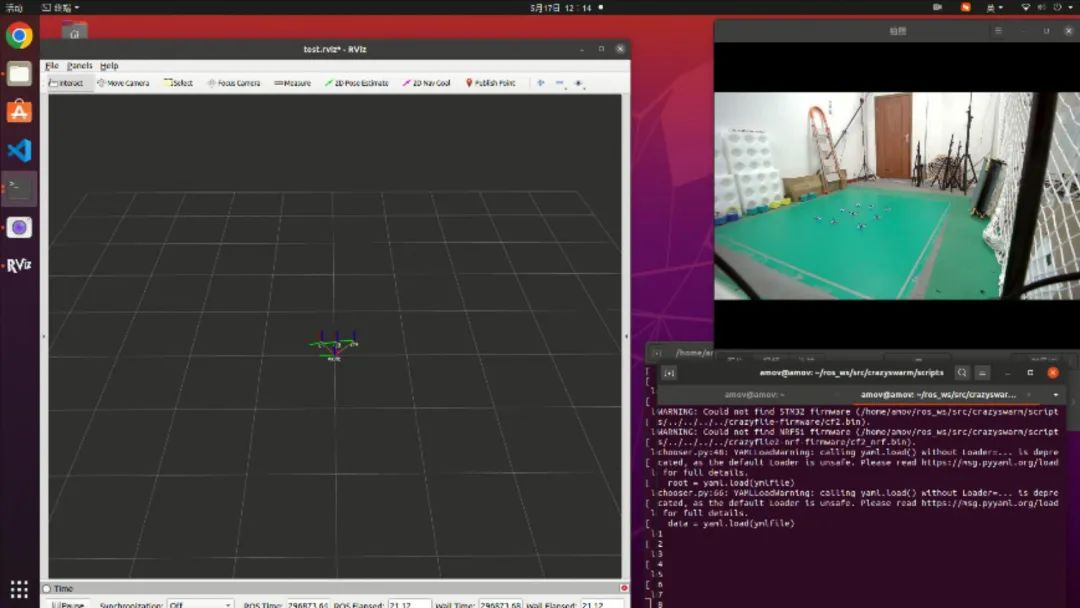
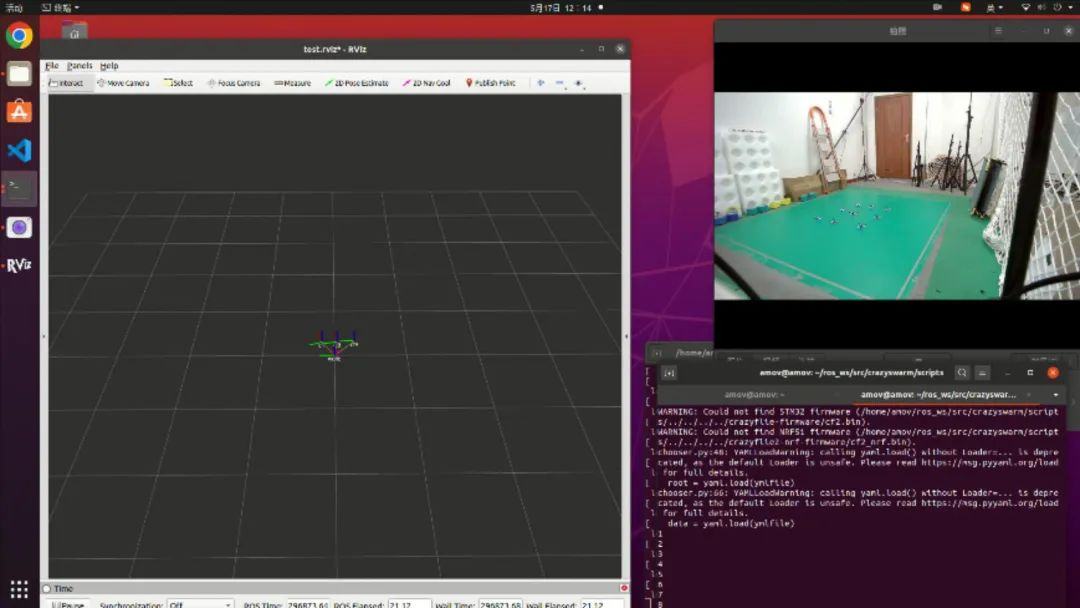
3.虚拟仿真:提供了虚拟仿真环境,开发者可以在计算机上模拟无人机的飞行和协同行为,进行算法开发和测试。
4.扩展性:支持模块化设计,开发者可以通过添加不同的扩展板(decks)来增加功能,如定位系统、传感器等。
技术原理
1.无线通信技术:使用无线通信技术(如2.4GHz ISM频段和蓝牙低能耗)实现无人机之间的通信,使它们可以进行协同飞行、信息交换和集群控制。
2.定位与导航技术:利用定位系统(如Lighthouse)实现高精度的无人机定位和导航,从而实现精准的集群控制和编队飞行。
3.传感器技术:配备了多种传感器,包括加速度计、陀螺仪、压力传感器等,用于实时感知无人机的状态和环境信息。
4.控制算法:采用先进的控制算法,如Mellinger控制器、PID等,来实现无人机的稳定飞行、编队飞行等功能。
5.集群协同算法:使用集群协同算法,如路径规划、避障策略等,使无人机集群能够协同飞行、保持队形等。
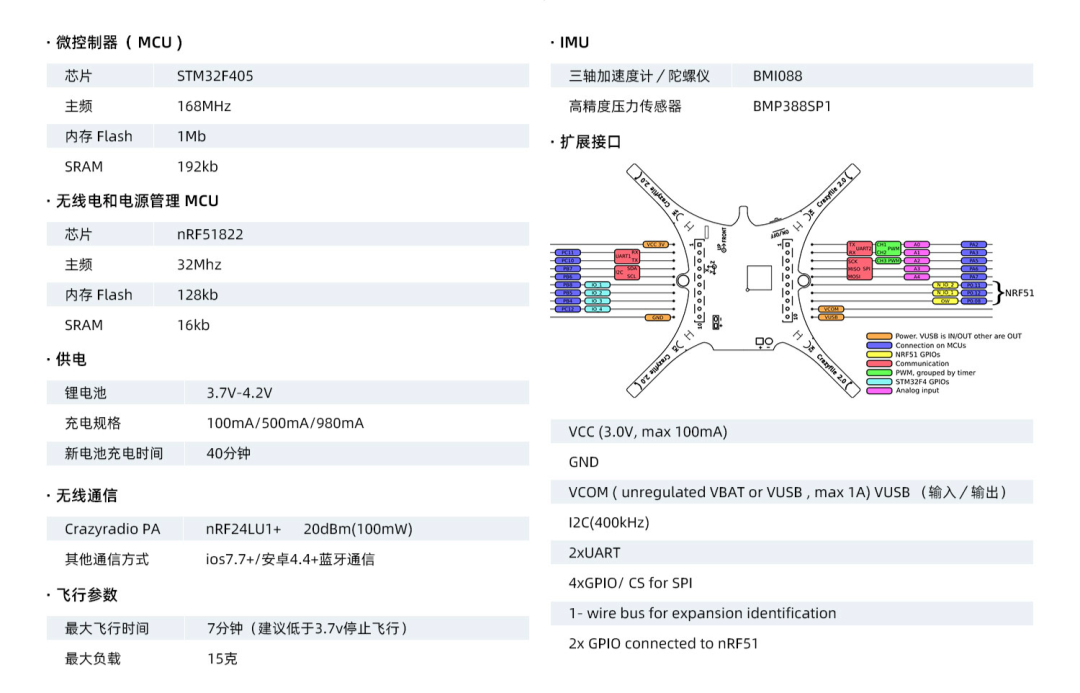
规格参数
未来展望
我们相信,Crazyswarm凭借其硬件的高拓展性以及软件的丰富接口,在未来还可以探索深度学习和人工智能技术的应用,实现更高级的图像处理、目标识别和行为预测等功能。这些发展方向将为Crazyswarm带来更广阔的应用前景和技术创新。
配套学习资源:
- Crazyswarm github地址:https://github.com/USC-ACTLab/crazyswarm
- Crazyswarm技术手册:https://docs.amovlab.com/crazyswarmwiki
购买方式
如您对Crazyswarm无人机集群套件感兴趣,可添加销售工程师微信,我们将给您提供专业的选购建议~
圆月: 13032891180(微信同号)
丹秋: 19182028523(微信同号)


