论文分享 | AGRNav:在易发生遮挡的环境中,用于空地机器人的高效节能自主导航系统
阿木实验室推出的开源项目校园赞助活动,再次迎来开发者参与!
香港大学王俊铭同学,基于阿木实验室P600无人机自主搭建了一整套陆空两栖机器人,并使用Prometheus开源框架完成算法的实机部署且发表了相关论文。其论文《AGRNav:易受遮挡环境下空地机器人高效节能自主导航》收录于机器人领域顶级会议ICRA 2024。后续工作正在审稿中,欢迎持续关注!根据活动规则,将获得阿木实验室赞助的奖学金5000元!
现将相关论文内容分享给大家,鼓励更多的开发者加入到我们校园赞助活动中来,只要你是参与开源项目或在相关技术领域获得荣誉成果的用户,参与活动就有机会获得阿木的奖学金!
主题: AGRNav:在易发生遮挡的环境中,用于空地机器人的高效节能自主导航系统
Author:Junming Wang, Zekai Sun, Xiuxian Guan, Tianxiang Shen, Zongyuan Zhang, Tianyang Duan, Dong Huang, Shixiong Zhao, Heming Cui
Author Affiliation:The University of Hong Kong (HKU)
Corresponding author:Heming Cui
arXiv: arXiv:2403.11607
会议: ICRA 2024
作者单位: 香港大学
第一作者: 王俊铭
通讯作者: 崔鹤鸣
内容概述
空地机器人出色的移动性和长续航能力正在引起人们对其在复杂环境(如森林和大型建筑)中导航应用的兴趣。然而,这些环境通常包含遮挡和未知区域,如果没有对未观察到的障碍物进行准确预测,在现有的基于映射和基于学习的导航方法下,空地机器人的移动往往会遭受次优轨迹。在这项工作中,我们提出了AGRNav,这是一个专为搜索安全和节能的空地混合路径而设计的新框架。AGRNav包含一个轻量级的语义场景补全网络(SCONet),具有注意力机制以捕获上下文信息和遮挡区域特征,进而实现障碍物的准确预测。该框架随后采用基于查询的方法,低延迟地将预测结果更新到网格地图中。最后,基于更新后的地图,分层路径规划器高效地搜索节能导航路径。我们通过在模拟和真实环境中的基准测试来验证AGRNav的性能,证明其优于经典方法和最先进的方法。

引用Prometheus说明
我们的定制AGR平台,由一个拥有600mm对角线轴距的四旋翼组成。该平台使用Prometheus软件系统,并配备了RealSense D435i深度相机和T265相机。它还配备了一个用于部署AGRNav框架的Jetson Xavier NX板载计算机。机动性由一个10,000mAh的能源来源维持,这使得其能够持续悬停达到26分钟。表2显示了在不同模式下每秒的能耗。文中引用为“Our custom AGR platform (Fig. 5), is composed of a quadrotor with a 600mm diagonal wheelbase. This platform employs the Prometheus \cite{Prometheus} software system and is equipped with a RealSense D435i depth camera and a T265 camera. It also features a Jetson Xavier NX onboard computer for the deployed AGRNav framework. Mobility is sustained by a 10,000 mAh energy source, which enables up to 26 minutes of hovering. Table 2 shows the energy consumption per second in different modes. ”
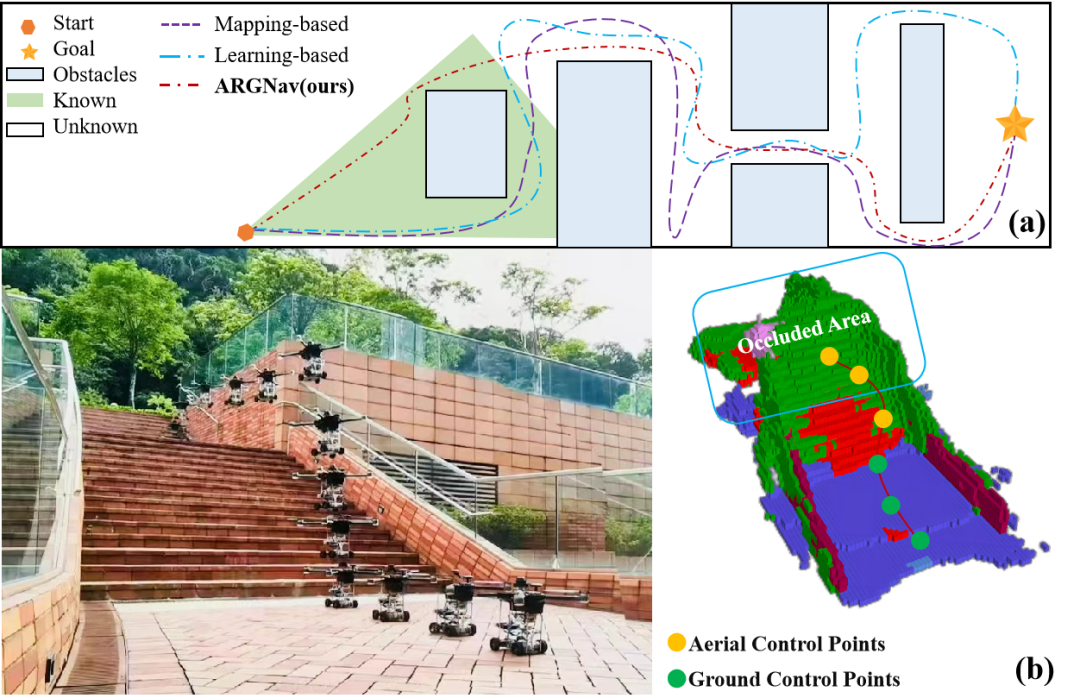
遮挡区域自主导航

第一代陆空两栖机器人
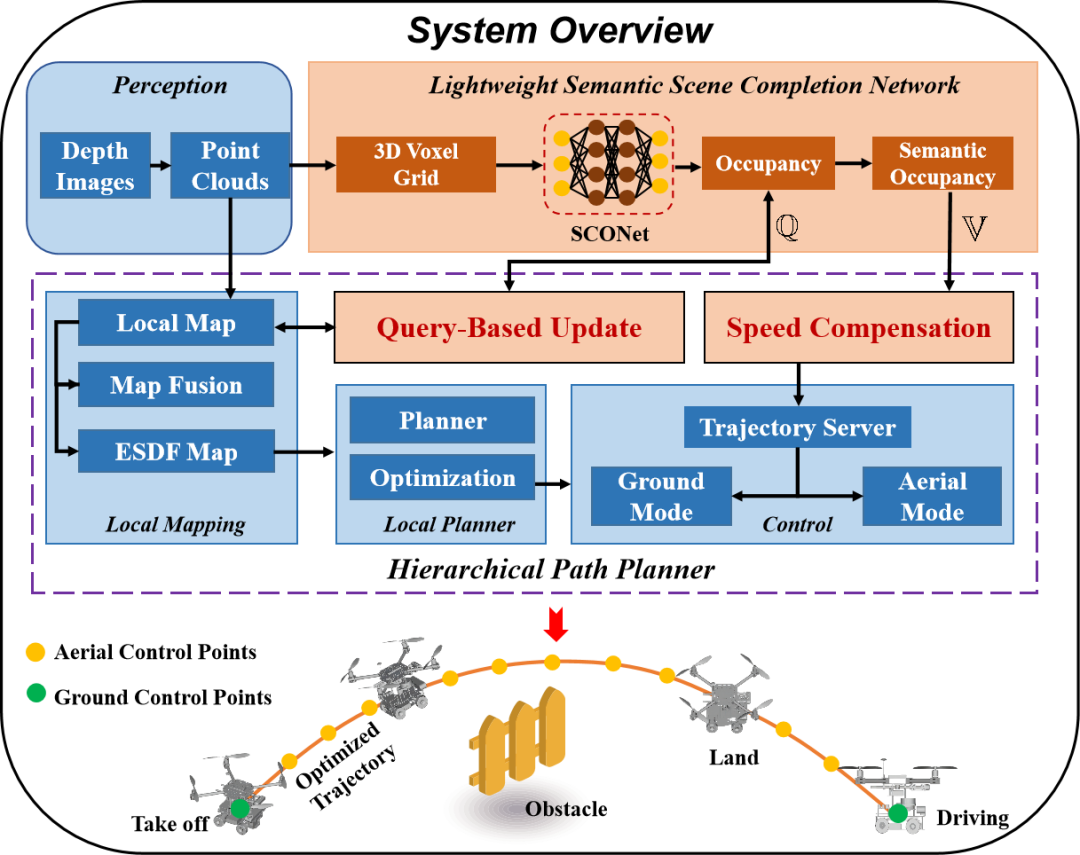
AGRNav整体框架
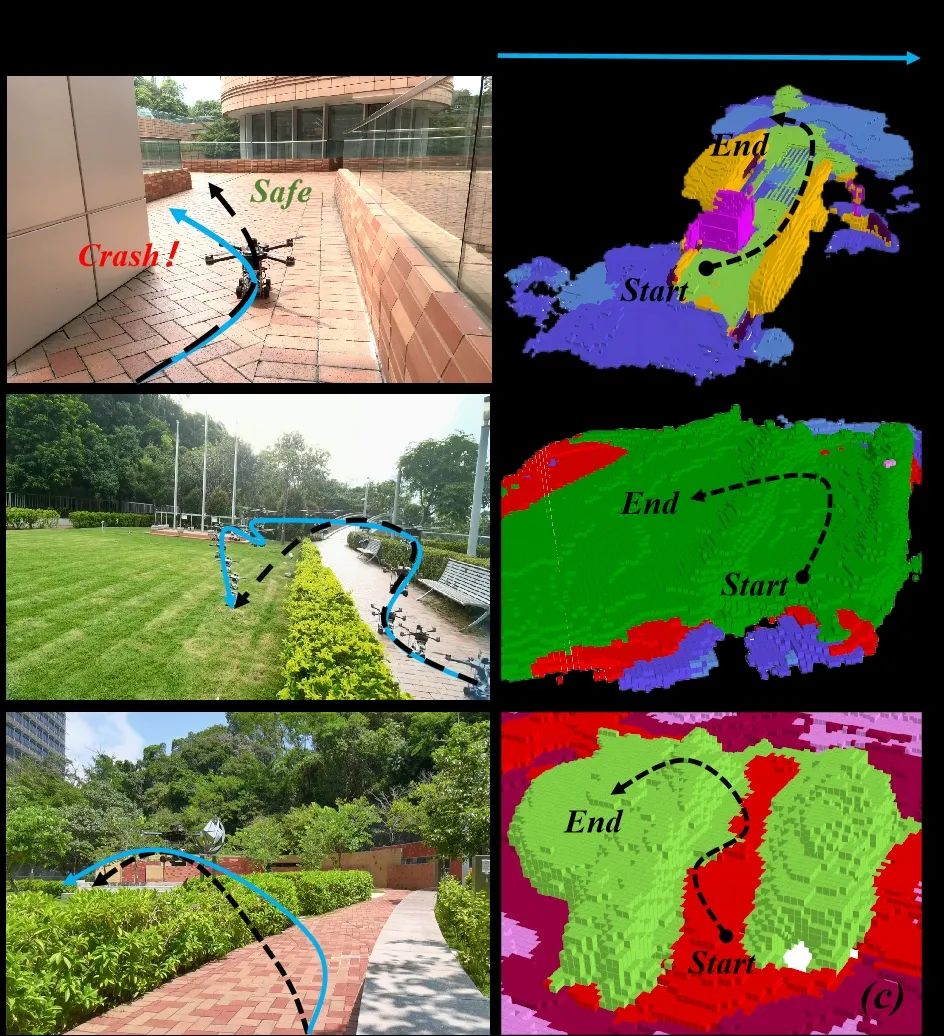
真机实验
如需了解更多论文内容,点击跳转:
https://arxiv.org/html/2403.11607v1
开源代码: https://github.com/jmwang0117/AGRNav\
阿木实验室校园赞助计划
阿木实验室校园赞助计划主要对象为参与开源项目或在相关技术领域获得荣誉成果的用户。活动分为两部分,分别是技术文章创作和论文奖学金,根据活动规则可分别获得一、二、三等奖的奖励,奖金最高可达10000元,欢迎大家踊跃咨询。阿木实验室,公众号:阿木实验室阿木实验室校园赞助,万元奖学金等你来挑战!
阿木实验室面向所有在校学生发起校园赞助活动!只要你是参与开源项目或在相关技术领域获得荣誉成果的用户,参与活动就有机会获得阿木的奖学金,名额有限快来参与~


