IROS论文分享:动态场景双向树规划算法RT-RRT
在动态环境中,无人机常因障碍物随机出现、移动而陷入路径规划困境。西北工业大学航海学院崔博提出了一种双向树实时规划算法RT-RRT,并在Prometheus仿真平台中进行了算法验证,结果显示RT-RRT将路径规划效率提升10倍,成功率提高16.7\%。该论文已被机器人领域顶级会议IROS 2024录用,并获得了阿木实验室2025校园奖学金活动二等奖5000元。
传统算法的缺陷
▪ RRTX等反向树(从目标点出发)算法,树的修复依赖于邻居状态迭代,样本少易失败,样本多耗时长。▪ 动态障碍物导致路径频繁中断,全局重规划效率低下。
RT-RRT的革新
▪ 双向树机制:反向树从目标点出发,预探索全局路径,正向树遇障时从当前位置快速“开新路”,连接反向树。▪ 路径优化策略:通过二分法剔除冗余节点,路径缩短20\%以上。
RT-RRT算法三步拆解
反向树预布局
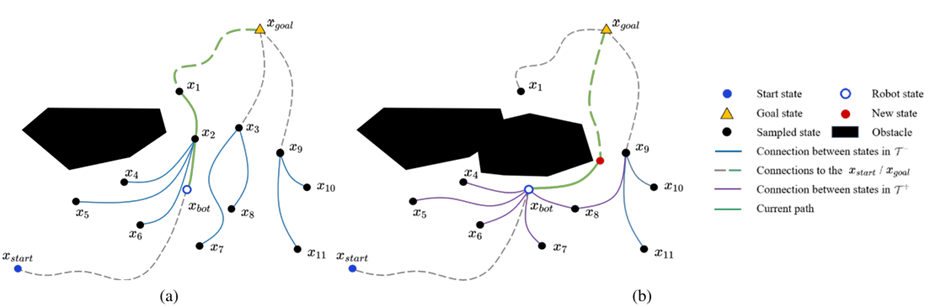
▪ 无人机起飞前,反向树从目标点出发,向四周扩散,生成多条潜在路径。▪ 优先选择靠近无人机的路径分支,减少后续连接距离。
正向树动态连接
▪ 如上图所示:当传感器检测到新障碍(如移动车辆),从无人机当前位置(xbot(t))生长T+树,主动连接T-。▪ 连接成功后,将T+分支反向写入T-,生成新路径。
路径优化
若新路径存在“绕弯”,算法自动在拐点处二分采样,找到更短的安全路径,路径长度平均缩短20.54\%,接近理论最优解。
仿真验证
阿木实验室Prometheus开源平台,为RT-RRT算法提供了算法验证的“试飞场”,成为论文成果从理论到应用的核心桥梁。
多传感器模拟
Gazebo中1:1还原无人机双目相机、激光雷达、IMU等传感器。
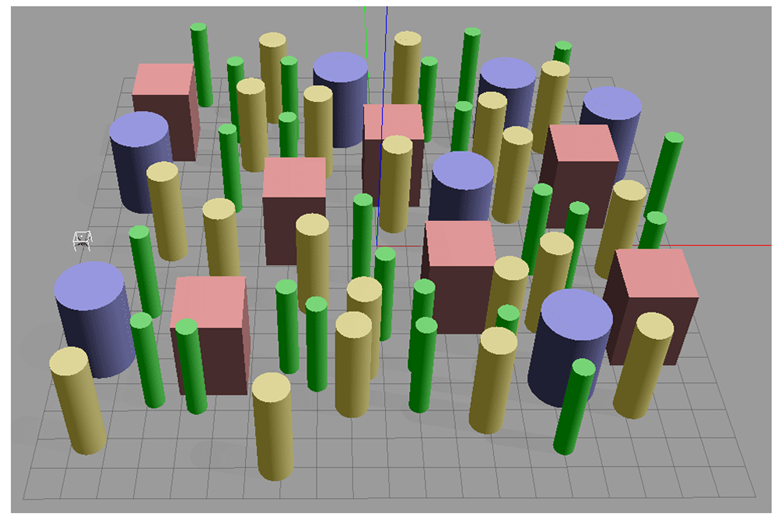
动态障碍物引擎
支持障碍物随机生成、移动轨迹编程(速度、方向可调),复现文中“不可预测动态环境”。
实验结果
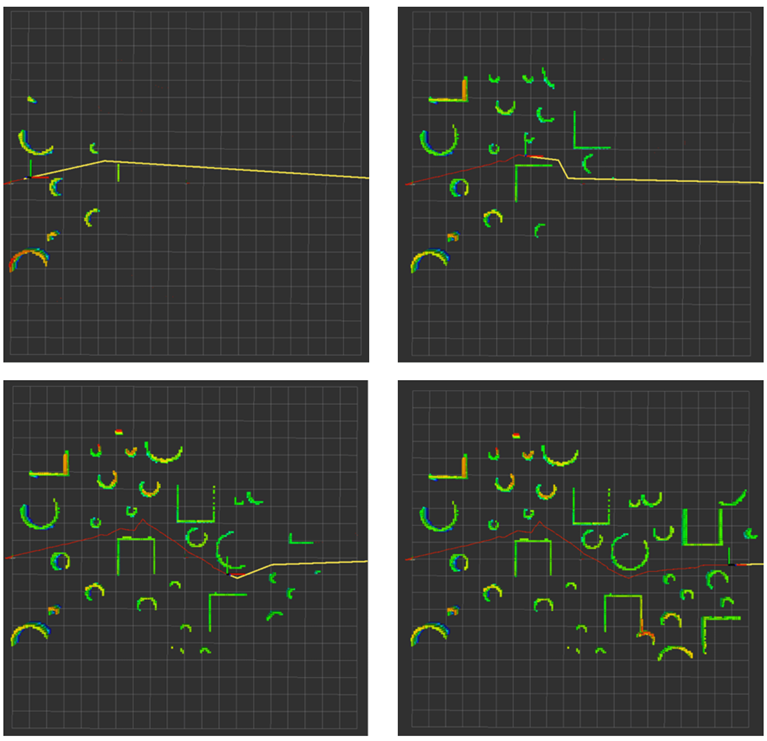
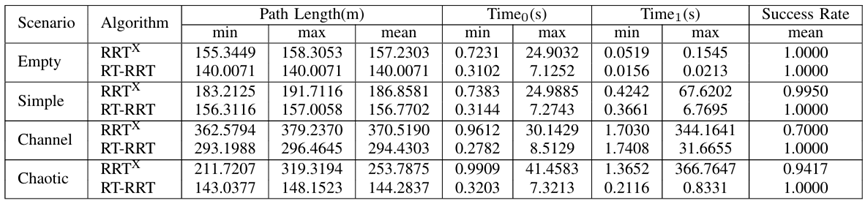
通过迷宫、通道、移动障碍等仿真场景复现,以及空场、简单场、通道场和混乱场的对比场景的实验,展示了RT-RRT算法在动态环境下高效、稳健的路径规划能力。实验表明,该算法可缩短路径、降低时间并提高成功率,能有效应对不可预测的障碍变化。
论文详情
主题:RT-RRT:不可预测的动态环境中的反向树引导的实时路径规划/重规划RT-RRT: Reverse Tree Guided Real-Time Path Planning/Replanning in Unpredictable Dynamic Environments
会议:2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)DOI: 10.1109/IROS58592.2024.10802722
论文链接: https://ieeexplore.ieee.org/document/10802722/
2025校园奖学金活动
为表彰在开源社区中不断贡献、或在无人机技术领域屡创佳绩的开发者,我们隆重推出校园奖学金活动,旨在激励更多人投身前沿科技,共同开拓无限可能。
🕛 活动时间:2025年1月1日-12月31日
✔ 活动对象:P230/P450/P600/SU17用户
🔹 每个机架号最多可有两名人员获奖
🔹 文章内容需基于使用阿木无人机或Prometheus项目
🔹 文章需提及Prometheus项目,且在参考文献中引用GitHub主页
🔹 需使用官方的引文
详情请查看2025校园奖学金计划火热申报中!


