车机协同编队系统解析,一文看懂通信与控制全流程
智能机器人系统正逐步从以单机为核心的任务执行模式,迈向更具协同能力的多机器人系统。尤其是在无人车与无人机的集群编队场景中,如何实现高效、稳定的协同作业,已成为机器人系统研究与工程部署中的热点课题。本文围绕阿木实验室推出的车机协同集群编队套件,介绍其在通信架构与控制方法上的实现思路,与大家探讨车机协同编队的实现路线。
01 集群通信
在多机器人系统中,通信是实现高效协同的核心。根据通信设备和软件架构的不同,可分为以下几类:
通信设备网络架构
集中式:设有主节点,其它从节点仅与主节点通信,节点之间的数据需经主节点中转。常见如路由器、主从式无线电台等。优点是架构简单,缺点是主节点易成为性能瓶颈。
分布式:所有节点地位平等,可两两直接通信,扩展性强但设计更复杂。
混合式:集群中部分节点彼此互联构成局部分布式网络,另一些节点则以从属方式接入主节点,兼顾灵活性与控制集中性。
通信软件架构
集中式通信系统(如ROS1多机组网):
由一台主机运行ROS Master,其它节点通过配置IP与其建立通信,实现话题和服务交互。配置简单,易于部署,但存在全局命名冲突风险,且程序需围绕主节点运行,资源利用率受限,性能依赖主节点负载。
分布式通信系统:
分布式则需自编程实现,以阿木实验室的集群通信系统为例
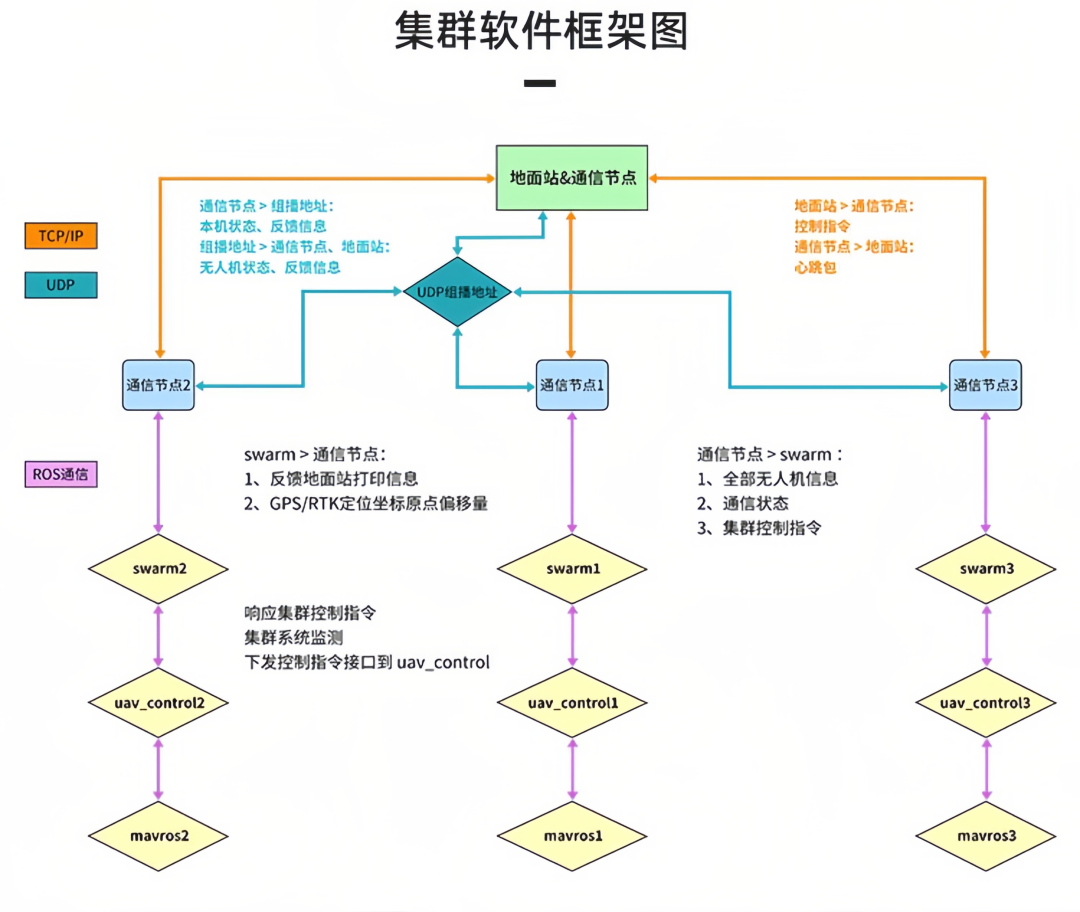
1. 无中心通信网络
该系统基于socketTCP/IP通信机制,由Prometheus地面站与各无人设备共同构成无中心的通信网络。
2. 双向可靠链路(TCP)
地面站与无人设备节点均创建了TCP的服务端和客户端。控制指令通过TCP由地面站下发至设备;设备通过 TCP 回传心跳包,实现状态监测与连接保持。
3. 实时状态通道(UDP)
地面站作为 UDP 客户端接收数据。设备既充当 UDP 服务端,又可主动广播:— 单播方式向地面站发送任务状态信息;— 组播方式将部分话题消息广播至局域网,其他节点只需订阅该组播地址即可共享信息。
4. 自定义协议格式
对所有消息进行编码、解析与路由,保证传输的灵活性和系统的可扩展性。
02 集群控制
控制系统是多机器人集群运行的核心,不同场景下需要灵活选择合适的协同控制策略,以保障整体协作效果。
领航跟随法
指定一架无人机作为领航者(Leader),其余无人机(Followers)根据领航者的位置和速度调整自身状态,保持预设的相对位置。适用场景:结构相对固定、任务路径已知的协同作业,如列队巡航、狭窄区域通行等。算法计算简单,通信开销低,稳定性高。
虚拟结构法
将整个无人机编队视为一个刚性虚拟结构,每架无人机对应结构上的固定点,通过控制虚拟结构的运动来调整编队.适用场景:适合需要稳定保持复杂编队结构的任务,如同步飞行、队形展示、多点感知协同等。可拓展性强,利于形态切换。
行为法
定义多种行为规则(如避障、跟随、巡航),无人机根据环境动态调整行为优先级。适用场景:任务变化频繁、环境不确定性高的场景,如巡检、搜救、探索任务等。系统响应更具适应性,但行为冲突需额外处理。
人工势场法
通过设计吸引势场(目标点)和排斥势场(障碍物、其他无人机)来调整无人机运动。适用场景:适合空间中需同时避障与趋向目标的复杂导航任务,如多机避碰、自主定位、多点覆盖任务。方法直观,但在局部极小值处可能存在陷入问题。
03 阿木实验室车机协同编队套件
在无中心通信网络的支撑下,编队控制负责把“多节点感知”转换为“协同运动”。阿木实验室的车机协同编队套件支持两种主流的协同控制方法:领航-跟随法与虚拟结构法,可按任务复杂度和环境动态切换。
领航-跟随法实现方式
在该方法中,假设每个跟随者(Follower)在领航者(Leader)自身坐标系下的位置保持不变。随着领航者沿预设轨迹运动,跟随者实时获取其状态信息,并将其坐标转换至 ENU系统(East-North-Up)中,再叠加自身相对偏移量,生成目标位置,进而实现动态编队控制。这一方式计算简单,通信开销低,适合编队结构相对固定的场景。
//旋转矩阵:机体系到惯性系
R_Body_to_ENU = get_rotation_matrix(this->uav_states_[0].attitude[0],this->uav_states_[0].attitude[1],
this->uav_states_[0].attitude[2]);
this->pos_enu_frame = R_Body_to_ENU * this->pos_body_frame;
if(this->follow_start_flag_)
{
if(this->agent_id_ == 1)
{
this->follow_pos[0] = this->all_uav_pos_[0][0];
this->follow_pos[1] = this->all_uav_pos_[0][1];
this->follow_pos[2] = this->all_uav_pos_[0][2];
}else
{
this->follow_pos[0] = this->all_uav_pos_[0][0] + this->pos_enu_frame[0];
this->follow_pos[1] = this->all_uav_pos_[0][1] + this->pos_enu_frame[1];
this->follow_pos[2] = this->all_uav_pos_[0][2] + this->pos_enu_frame[2];
}
}
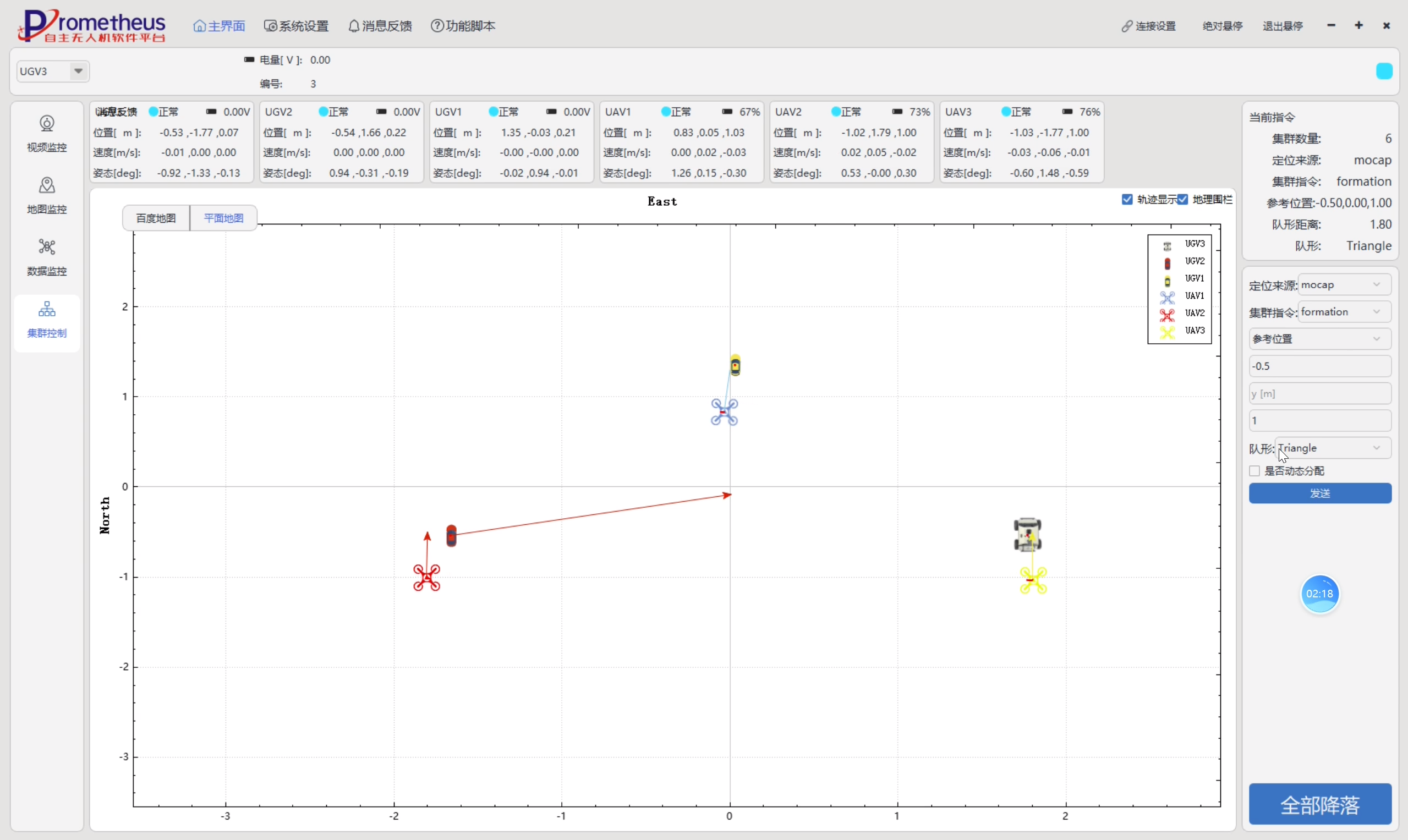
虚拟结构法实现方式
虚拟结构法将整个编队抽象为一个刚性结构,每个设备对应其中的一个固定点。系统支持一字形、三角形、方形、圆形等常见队形,并根据输入的设备数量与间距参数,自动生成各点位坐标。通过分配算法,系统为每个设备匹配最近的目标点,并发送相应控制指令,引导其就位,完成编队重构。该方法适用于动态变换编队形状或多设备切换任务的复杂场景。
扫码联系我们,获取该产品更多信息

如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:bbs.amovlab.com
有工程师亲自解答10000+无人机开发者和你共同进步!


