无人机实验室建设方案
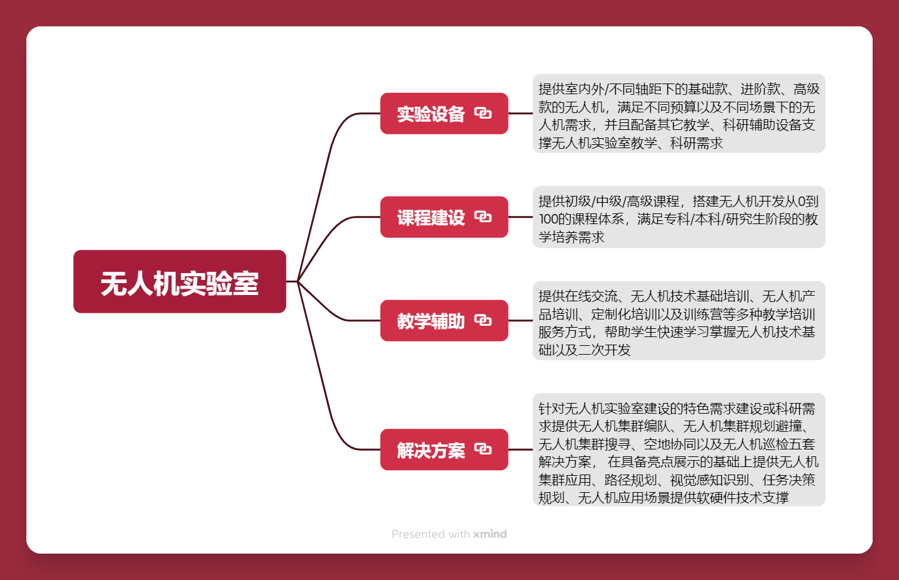
阿木实验室无人机实验室建设方案以“阶梯式培养、全链路覆盖、产学研融合”为核心理念,面向专科、本科及研究生多层次教学与科研需求,构建了从无人机基础工具链 → 单机控制 → 高阶功能 → 集群智能 → 行业应用的全生命周期教学科研体系。
系统方案包括课程体系、实验设备、仿真实验平台、科研解决方案及配套培训服务,帮助学校实现从基础教学到科研创新的纵向贯通,支撑学科竞赛、毕业设计、科研论文与产业项目落地。
方案构成
1.阶梯式课程体系
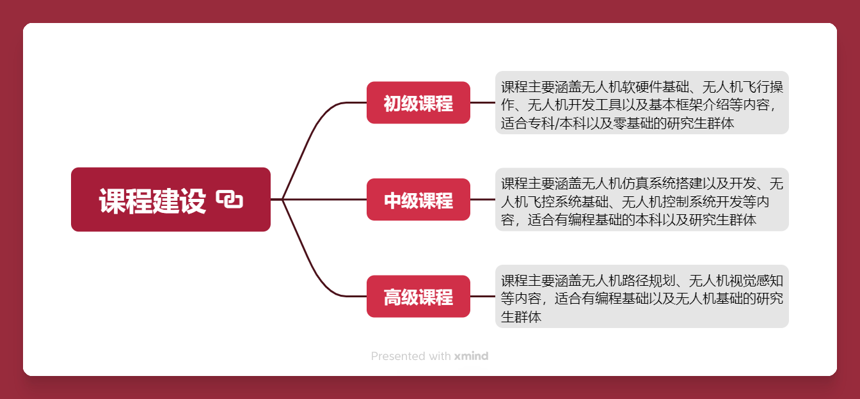
课程体系分为初级、中级、高级三个层次,涵盖从系统入门到高阶算法开发的全流程:
初级课程:Ubuntu 系统、ROS 框架、无人机软硬件结构等基础课程,打牢工程开发基础;
中级课程:PX4+Gazebo 联合仿真、遥控飞行实操、MAVROS/Prometheus 控制开发;
高级课程:EGO-Planner 路径规划、SpireCV 视觉检测与目标追踪、多机协同与集群控制;
阿木实验室围绕“从零基础到科研创新”的培养目标,构建了覆盖初级入门、中级实训、高级科研的完整阶梯式课程体系。课程不仅能匹配专科、本科、研究生不同阶段的学习需求,还能根据各高校的教学重点和科研方向灵活定制,与特色课程、课题研究、竞赛项目无缝衔接,实现真正的“按需搭建、精准匹配”。
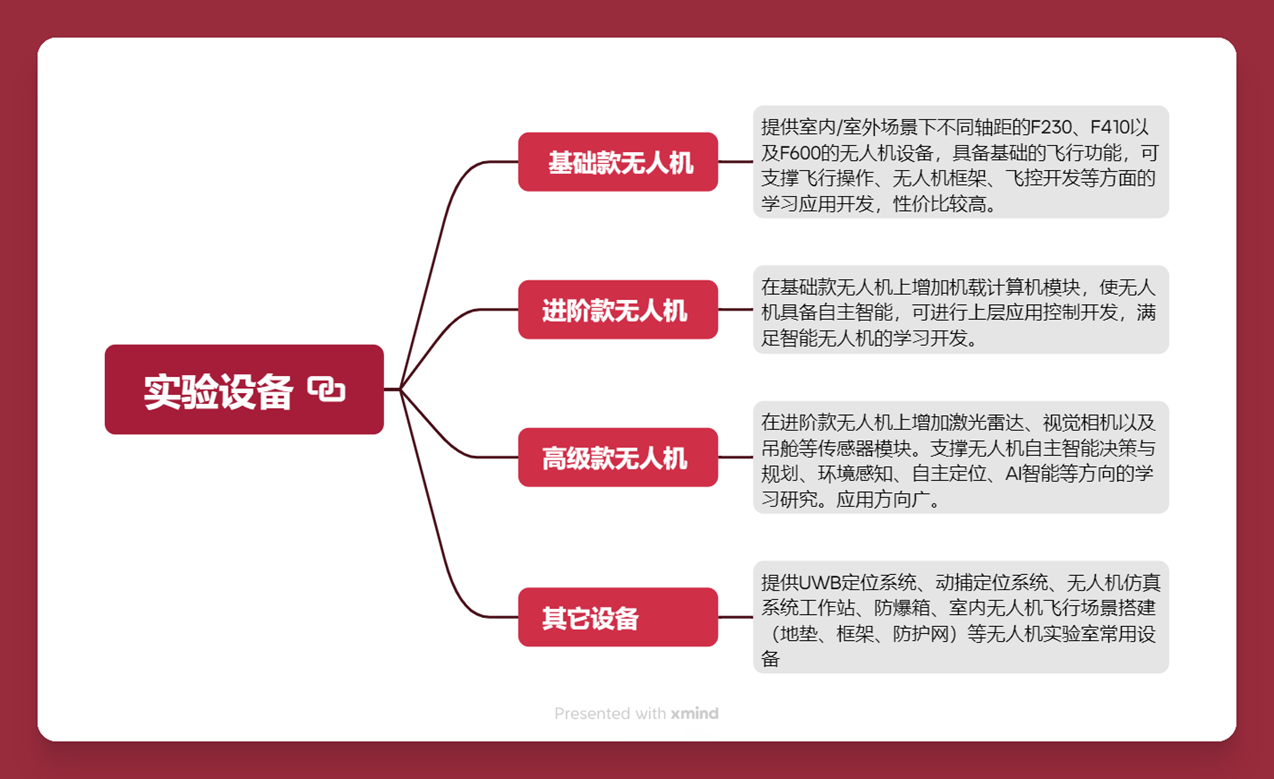
2.实验设备介绍
实验室配备涵盖教学、科研及创新实践的全栈式设备体系,支持从仿真验证到实机部署的完整研究链路。


3.多场景解决方案
多场景解决方案围绕高校科研与工程实践需求,加速产学研融合,阿木实验室推出了五大特色技术方案,这些方案不仅支持实验与教学,还能作为科研创新的基础平台,帮助高校快速形成特色研究方向,推动项目孵化与实际应用落地。
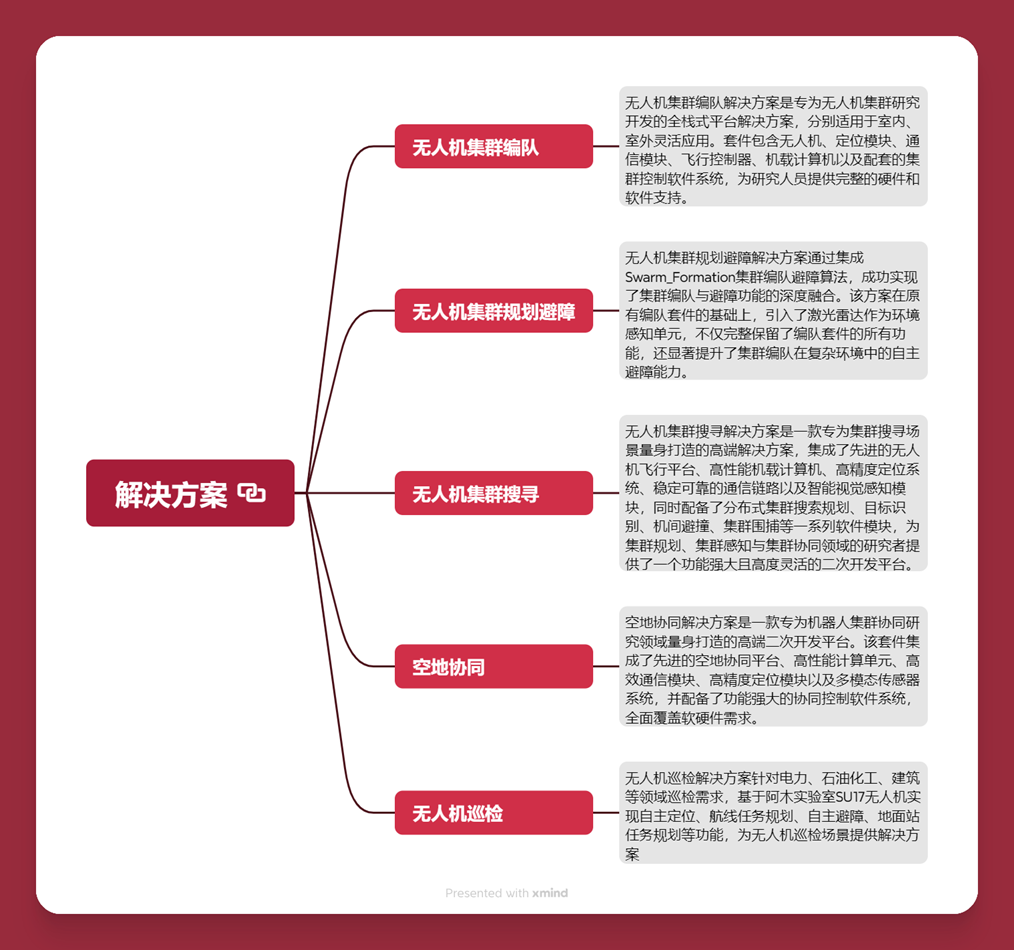
① 无人机集群编队系统
基于 ROS/PX4 与 Prometheus 框架实现分布式智能编队,支持一字、三角、矩形、圆形等多种队形变换,适配室内外定位(MOCAP/UWB/RTK)。系统具备安全保护、仿真联调、人机交互与全套开源接口。
② 集群智能规划与避障系统
通过 SwarmFormation 算法与激光雷达感知融合,实现多无人机队形保持与动态避障,具备实时地图构建与编队路径修正能力。
③ 集群协同搜寻系统
采用 MPC 控制与视觉识别结合,实现分布式区域搜索、机间防撞、目标识别与集群围捕功能,具备完全开源的控制与感知算法接口。
④ 空地一体化协同系统
实现无人机与无人车间的智能协同:无人机空中识别并锁定二维码目标,将位置信息传递给地面车辆完成自主导航与避障;支持 ROS/Gazebo 仿真与全开源代码。
⑤ 智能巡检系统
基于阿木 SU17 无人机平台,集成四目 SLAM、激光雷达、云台吊舱与 AI 感知系统,支持电力、建筑、石化等行业自动巡检任务,具备强环境适应性与全接口二次开发能力。
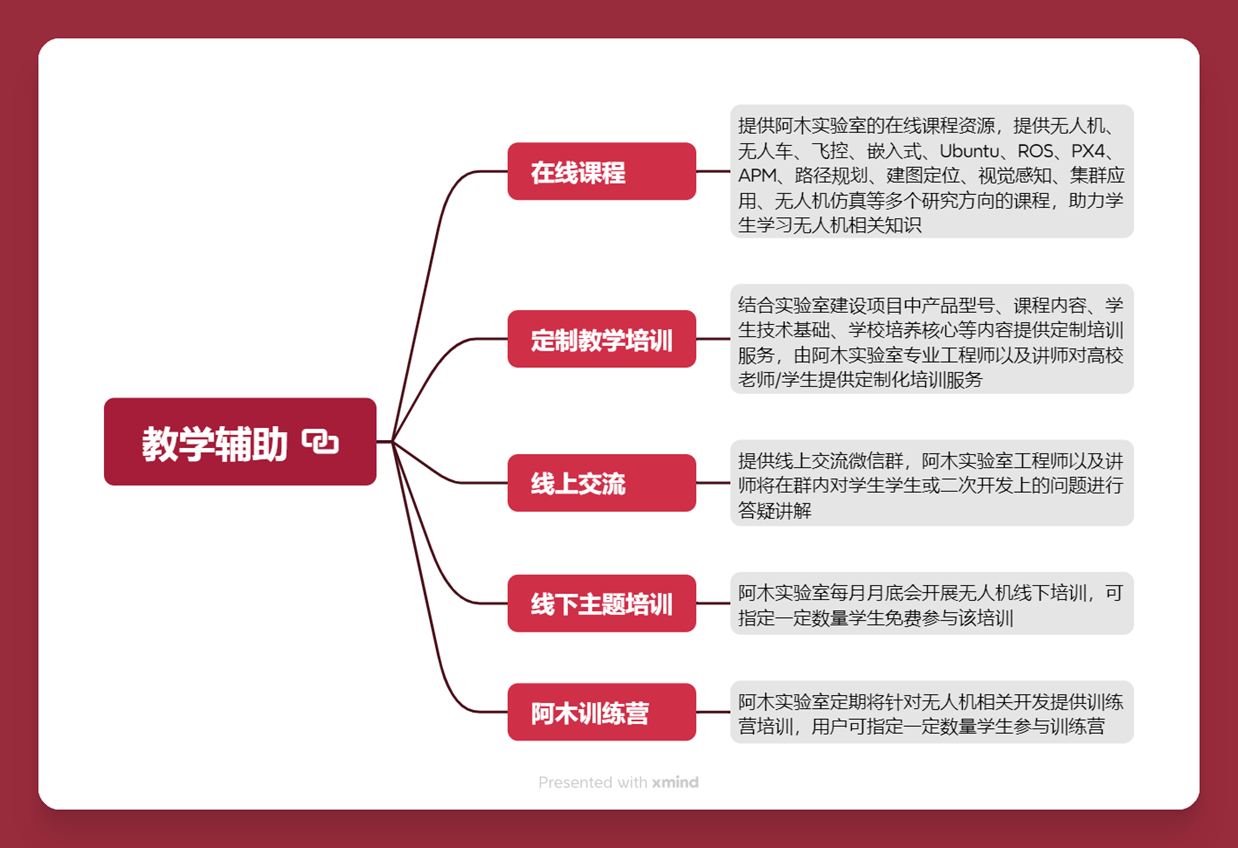
教学与培训支持
阿木实验室提供体系化的专业教学与培训服务,包括在线课程、定制化教学、线下实训与技术支持,全面保障高校推进教学与科研任务,帮助学生系统掌握无人机知识、开发技能与前沿技术应用能力。
根据高校的教学重点和科研方向,进行定制化技术培训
配套线下阿木实验室沉浸式训练营
Prometheus无人机月度培训线上培训课程
开设线上专属技术答疑群,专业工程师团队在线解答
开源生态支持
阿木实验室依托Prometheus、FMT、SpireCV、KKSwarm四大开源项目,打造了覆盖控制、规划、视觉与集群的开源技术生态,形成集开源资源、系统课程与技术支持于一体的全链路学习体系。除了提供配套课程与专项培训,阿木实验室还构建了多元化的交流平台:
技术论坛助力知识沉淀,10000+开发者共同进步
技术社群活跃,支持及时交流与合作



